2020-08-11
Lotnicze naziemne radionamierniki.
Część 2.
Marek Kaiper
Radionamierniki UKF ARP-6 i ARP-6D.
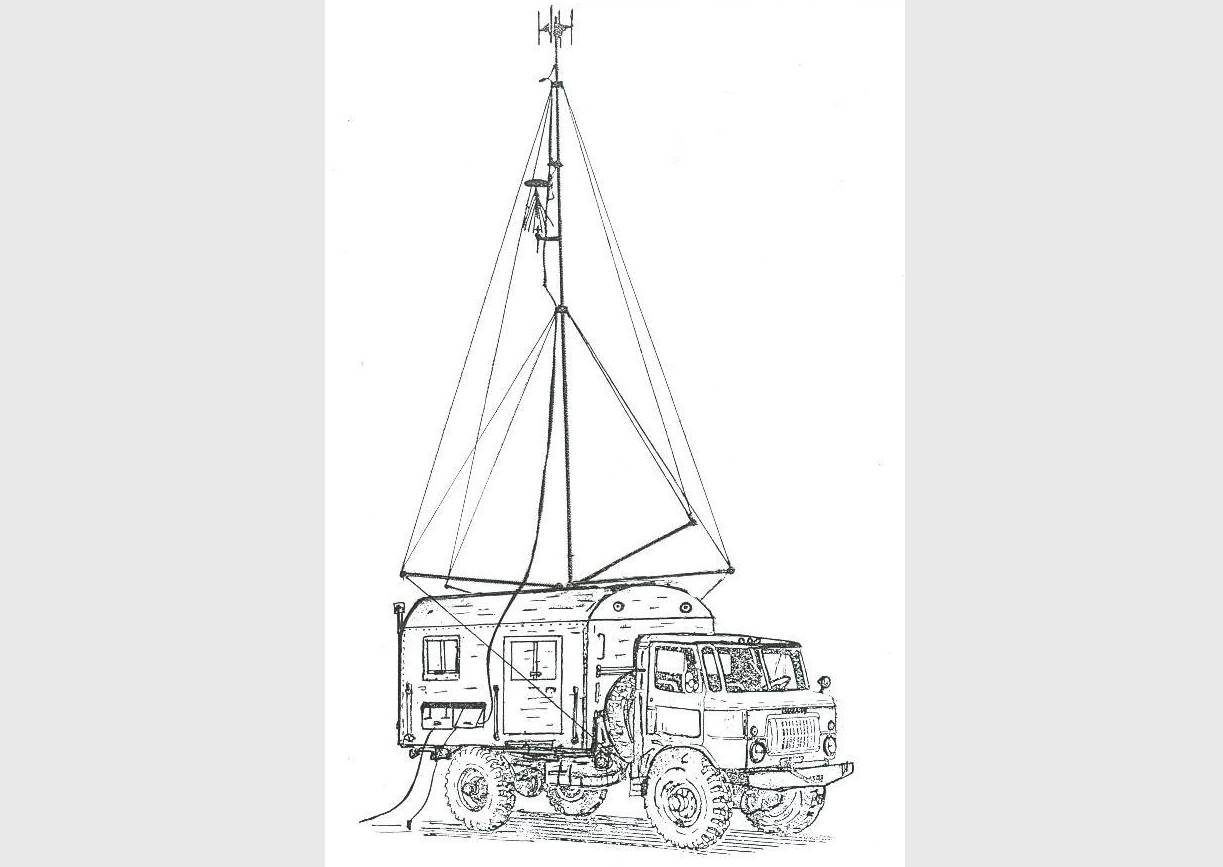
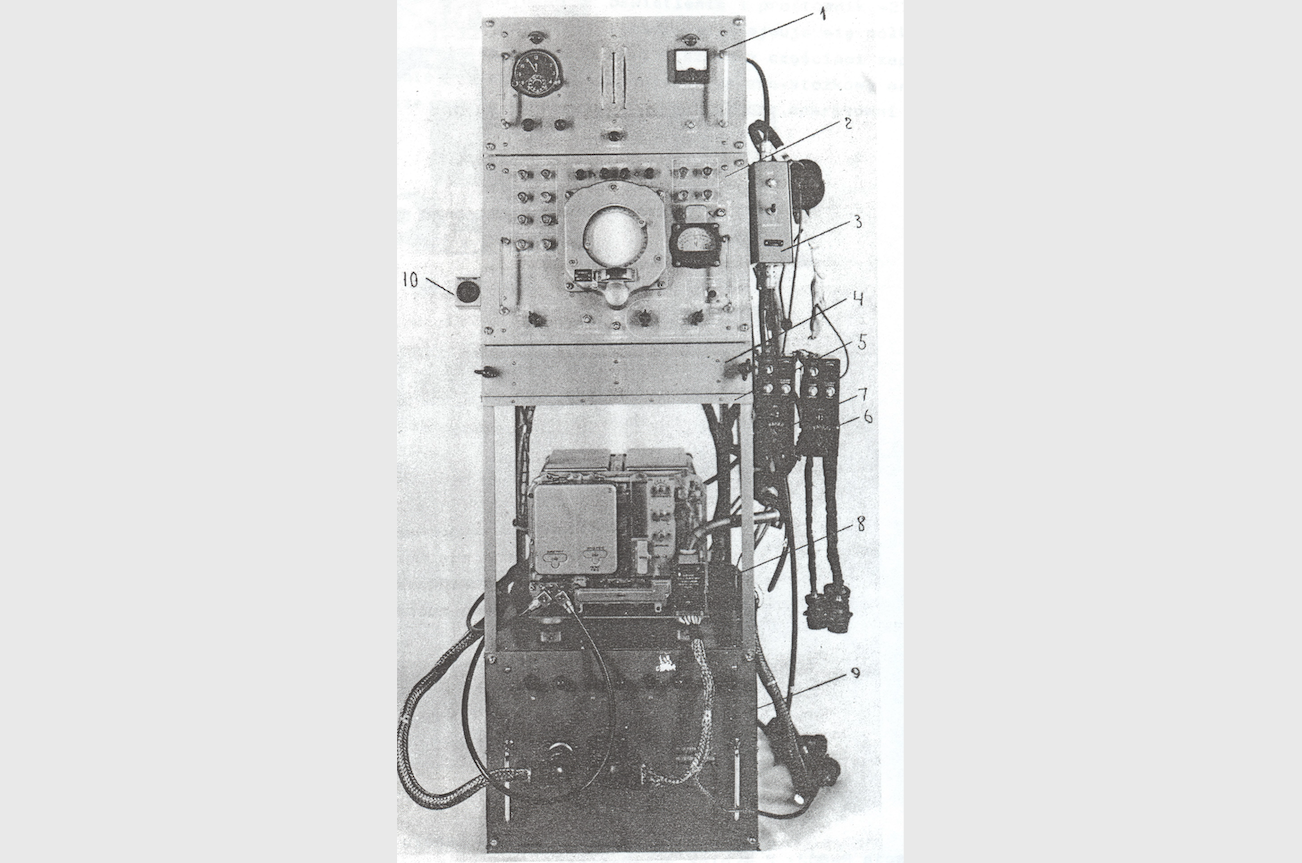
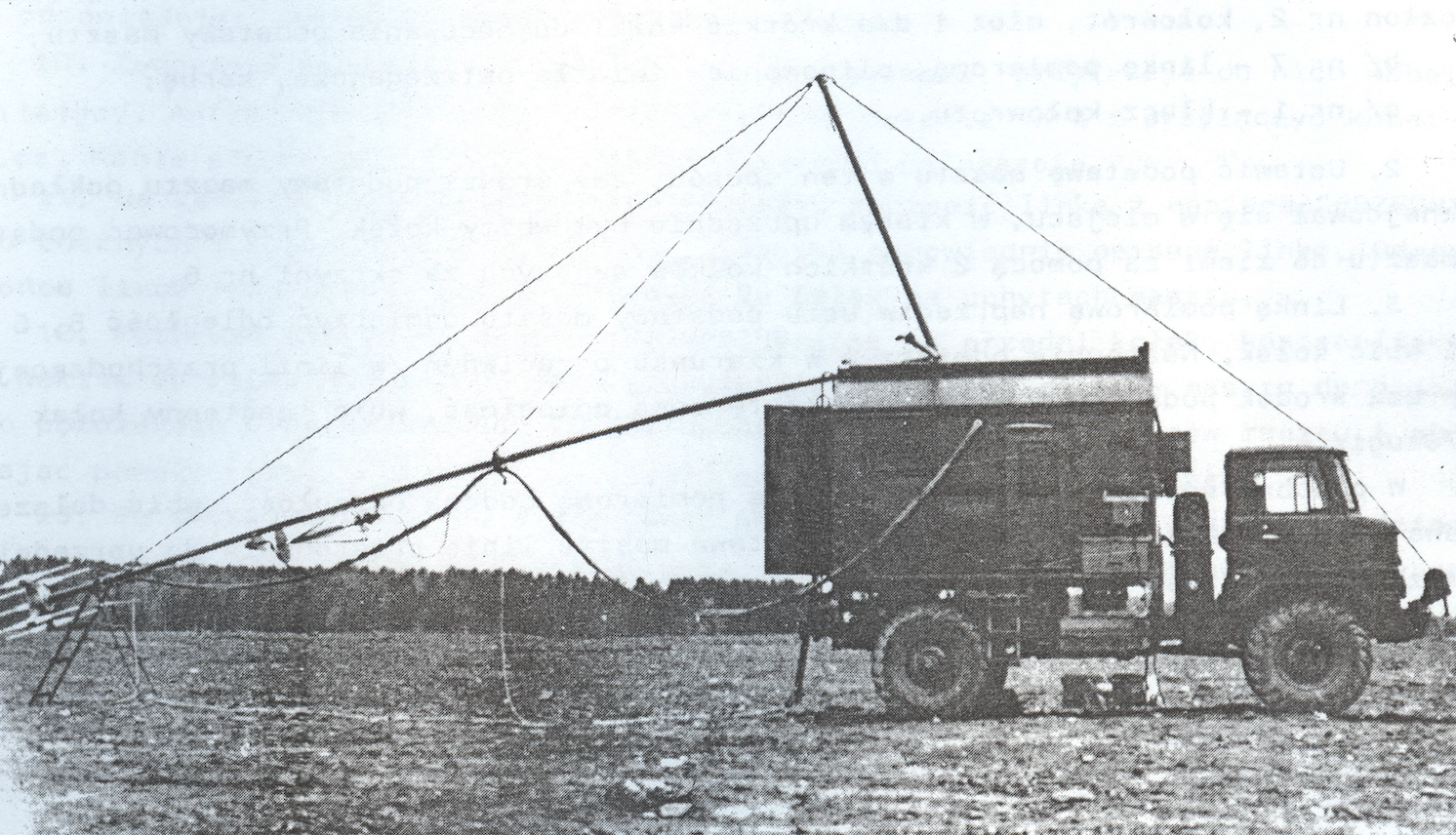
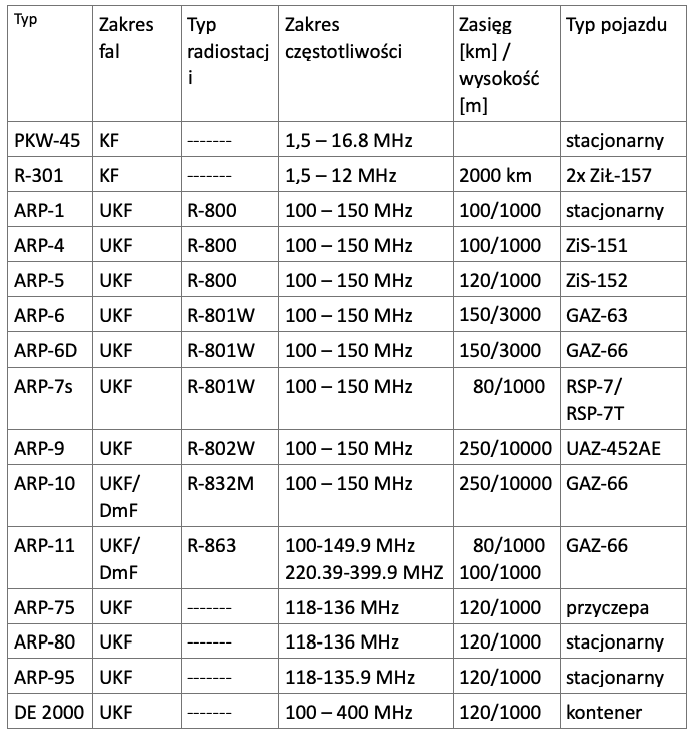
Dwukanałowy radionamiernik ARP-6 był zupełnie nową konstrukcją w stosunku do swoich poprzedników. Montowany był także na mniejszym samochodzie GAZ-63 a później GAZ 66 z nadwoziem KUNG-2. W Czechosłowacji radionamierniki te montowano na samochodach 6×6 Praga V3S. Był to najdłużej używany typ radionamiernika w lotnictwie WP, od pierwszej połowy lat 60-tych do 1996 roku kiedy wybrakowano jeden z ostatnich ARP-6D w 4 Bazie Lotniczej. Był to najdłużej używany typ radionamiernika w lotnictwie WP, od pierwszej połowy lat 60-tych do 1996 roku, kiedy wybrakowano jeden z ostatnich ARP-6D w 4 Bazie Lotniczej.
System antenowy składał się z dwóch anten typu „H” (N-S i E-W) z dipolami prostymi mających charakterystykę zbliżoną do ósemki i umieszczonego geometrycznie między nimi prostego dipolu centralnego mającego charakterystykę dookólną. Indukowana w antenach siła elektromotoryczna była proporcjonalna do wysokości anteny i kierunku przychodzącego sygnału. Różnica fazowa między sygnałem z anteny N-S a E-W jest informacją o kierunku namiaru. ARP-6 wyposażony był w radiostację UKF R-801W oraz odbiornik R-801W dla drugiego kanału. W APP-6D zastosowano dwie radiostacje R-802W dla pierwszego i drugiego kanału. Kolejną różnicą były bloki przełączania drugiego kanału BK-9, w ARP-6 zastosowano w nich układ elektromechaniczny, w ARP-6D był to lampowy układ elektroniczny. Podczas pracy dwukanałowej linia namiaru na ekranie dla I kanału była ciągła a dla II kanału przerywana. Praktycznie praca dwukanałowa używana była sporadycznie. W szufladzie pod blokiem głównym BP-3 (wskaźnikiem), umieszczony był zamontowany na stałe przyrząd IKD do doboru diod germanowych D-2W w główce antenowej A-10. Wystarczyło wyciągnąć kable i przykręcić je w miejsce kabli odłączonych. W tym przypadku wskaźnik ARP-6 pracował jako oscyloskop umożliwiając dobór diod parami. Wskaźniki wynośne WTK-1 (ARP-6) i WIK-1 (ARP-6D) mogą być połączone z radionamiernikiem czterożyłowym pupinizowanym kablem polowym P-271M o długości do 10 km. Do nagrywania korespondencji używano magnetofonów drutowych MIZ-10, taśmowych MAG-8 lub taśmowych polskiej produkcji MAK-S. Do zorientowania radionamiernika na kierunek północy używano busoli artyleryjskiej PAB-2 i generatora kontrolno – pomiarowego KIG mogącego pracować na jednej z 11 dostępnych częstotliwości. Zasilanie napięciem 220 V 50 Hz z sieci lub dwóch zespołów prądotwórczych AB-1 -0/230 oraz awaryjnie z baterii akumulatorów ZST-70PM za pośrednictwem włączającej się automatycznie przetwornicy PO-500 na okres 30 minut. Wystarczało to na przygotowanie i włączenie zespołu prądotwórczego.


Radionamiernik UKF ARP-9.
Dwukanałowy radionamiernik ARP-9 zamontowany był w samochodzie UAZ-452 AE (mikrobus) z przyczepą GAZ-704. Wyposażony był w system antenowy AMU o wysokości 9 m z główką antenową taką jak w ARP-6, rozstawiany 70 m od aparatowni oraz antenę kontrolnego generatora rozstawioną w odległości 0,8 – 8 m od radionamiernika. Wyposażony był w aparaturę TU-TS umożliwiającą zdalne sterowanie radionamiernikiem przez wysyłanie 12 sygnałów (komend) w zakresie częstotliwości 3 kHz-4,3 kHz z punktu sterowania oraz 6 sygnałów o częstotliwości 4 kHz-6 kHz z radionamiernika do punktu sterowania. Za ich pomocą dokonywano zdalne włączenie i wyłączenie radionamiernika, wybór odpowiedniego kanału radiostacji R-802, włączenie i wyłączenie generatora kontrolno pomiarowego KIG oraz tłumika szumów. Z radionamiernika przesyłana były informacje o stanie pracy, naruszeniu instalacji zabezpieczającej oraz łączność telefoniczna. W skład punktu zdalnego sterowania wchodziły blok dyspozytorski BPD, blok wykonawczy IP oraz dwa wskaźniki wynośne IEM wyposażone we wskaźniki elektromechaniczne (wskazówkowe) po jednym dla każdego kanału radionamiernika. Sygnały zdalnego sterowania przesyłane mogły być kablem P-274 na odległość do 12 km. Zasilanie 220 V 50 Hz z sieci przez przetwornicę 50Hz/400Hz lub napięciem 220V 400 Hz z dwóch zespołów prądotwórczych AB-2-0/230/Cz400.
Radionamiernik DMF ARP-10.
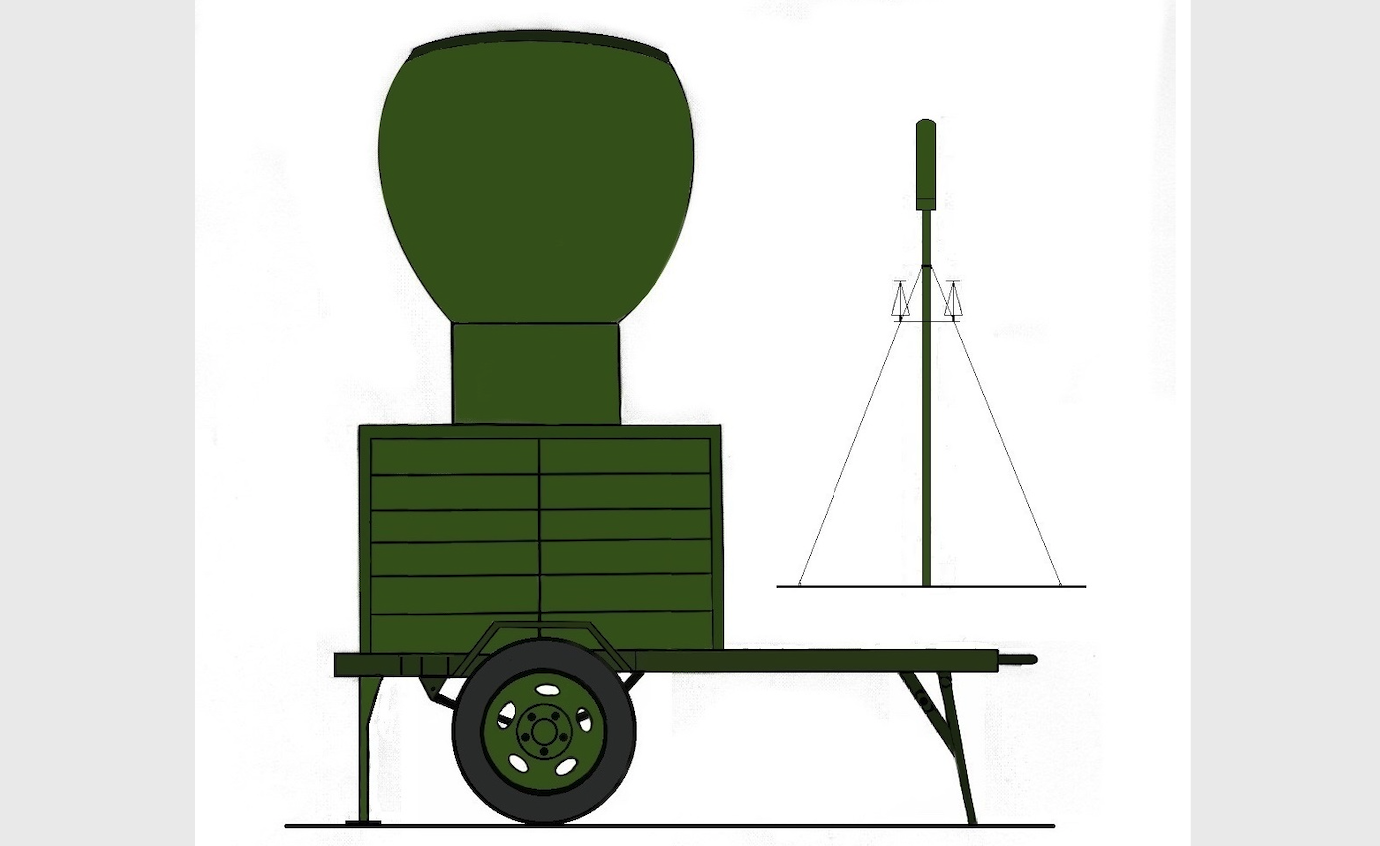
Dwukanałowy radionamiernik ARP-10 mimo wyposażenia w dwie radiostacje UKF/DmF R-832M przewidziany był do pracy jedynie w paśmie DmF. Radionamiernik był produkowany w 3 wersjach ARP-10-I i ARP-10-II na samochodzie GAZ-66 i ARP-10-III w aparatowni ustawianej na podnośnikach. W wersji II i III antena wraz z kolumną napędową montowana była na nadwoziu stacji zasilania EP-4 na jednoosiowej przyczepie, w odległości 35 m od aparatowni. W tych wersjach dodatkowa antena radionamiernika umieszczana była na maszcie o wysokości 6 m stojącym obok aparatowni. Dzięki różnicy wysokości między obydwiema antenami uzyskiwano większą dokładność radionamierzania. Radionamiernik wyposażony był w stałą antenę generatora kontrolno pomiarowego KIG ustawioną w odległości 35 m od anteny głównej (70 m od aparatowni). Przy pomocy urządzenia KIG można kontrolować systematycznie nastrojenie radionamiernika na 17 dowolnie wybranych częstotliwościach. Radionamiernik podobnie jak ARP-9 wyposażony był w aparaturę TU-TS służącą do zdalnego sterowania oraz w dwa wskaźniki wynośne.
Radionamiernik ten pracuje metodą fazometryczną. Czyli pomiaru przesunięcia fazowego między napięciem w.cz. odebranym od namierzanego samolotu a napięciem wzorcowym. Antena radionamiernika składa się z nieruchomego dipolu i obracającego się wokół niego reflektora. Dzięki czemu charakterystyka kierunkowa anteny ma kształt obracającej się kardioidy. Odebrany sygnał jest modulowany amplitudowo z częstotliwością obrotów reflektora. Po przetworzeniu powstaje sinusoida, której faza zależy od namiaru na samolot. Sinusoidalne napięcie wzorcowe powstaje w generatorze, którego wirnik obraca się wraz z obrotami reflektora anteny. Radionamiernik jest zorientowany tak, by podczas obrotu anteny, w chwili pokrycia się jej z kierunkiem północy faza napięcia wzorcowego wynosiła zero.
ARP-10 przystosowany był do pracy z radiolokacyjnymi systemami lądowania RSP-6, RSP-7T, RSP-10 w przypadku przejścia w korespondencji radiowej na zakres DmF.
Źródło zasilania: stacja zasilająca EP-4 na przyczepie IAPAZ-738 (1-P-1,5) składająca się z dwóch zespołów prądotwórczych AB-4-0-230/Cz 425. Zasilanie z sieci trójfazowej 220/380V 50 Hz za pośrednictwem przetwornicy AŁA-3,5 wytwarzającej napięcie 220V 427Hz.
Magnetofon MAK-S jest w dwóch rozmiarach. To był najczęściej używany magnetofon na ARP-6 i ARP-6D.
Radionamiernik UKF/DmF ARP-11 (Je-512).
Dwukanałowy radionamiernik ARP-11 był radionamiernikiem na oba pasma łączności lotniczej (UKF/DmF). Wyposażony był w dwie radiostacje UKF/DmF R-863. Zakres częstotliwości 100-149.975 MHz i 220-399.975 MHz. Zasięg przy wysokości lotów samolotu 1000 m dla zakresu UKF- 80 km a dla zakresu DmF – 100 km. Przy wysokości lotu 3000 m zasięg wynosił dla zakresu UKF – 150 km a dla zakresu DmF – 180 km. Możliwe były jednoczesne namiary na 2 roboczych częstotliwościach. Korespondencja radiowa zapisywana była na dwóch drutowych rejestratorach MS-61. Namiar wyświetlany był na wskaźniku cyfrowym Je-512.06 (E-512-06) z dwoma wyświetlaczami górny dla 1 kanału radionamiernika, dolny dla 2 kanału oraz na wskaźniku świetlnym wskazującym analogowo wartość namiaru światełkiem na skali opasującej oba wskaźniki cyfrowe. (36 lampek sygnałowych). W skład kompletu wchodziły dwa wskaźniki wynośne Je – 512.07, które mogą być ustawione na wieży kontroli lotów lub w systemie lądowania RSP, w ich składzie był magnetofon drutowy MN-61. Wskaźniki wynośne podłączane były do systemu TU-TS umożliwiającego zdalne sterowanie radionamiernikiem. Pozwało to na przesłanie 34 komend sterowania i wysyłania 12 sygnałów kontrolnych. Dzięki czemu radionamiernik mógł pracować bez personelu podając namiary ze stanowiska dowodzenia. Podczas pracy z punktu dowodzenia możliwe było połączenie sygnału radionamiaru z wskaźnika Je – 512.07 ze wskaźnikami wynośnymi WISP-75 systemu lądowania RSP-10MN, w celu identyfikacji samolotu wywołującego. Kable łączące radionamiernik ze wskaźnikiem wynośnym sprawiały wiele problemów dlatego też najczęściej ich nie kładziono.
Radionamiernik był zamontowany na samochodzie GAZ-66-05 z nadwoziem K-66N z przyczepą IAPAZ-738. System antenowy składał się z masztu AMU-1 z główką antenową Je-519-2 ustawionego na dachu nadwozia oraz masztu AMU-2 z główką antenową Je-519-2 umieszczony w odległości 100 m od aparatowni radionamiernika. Główki antenowe wyposażone były w 8 prostych dipoli oraz umieszczony w środku dipol centralny. Czyli 4 skrzyżowane anteny typu „H”. Radionamiernik mógł pracować tylko z anteny na dachu nadwozia lub z anteny wynośnej a także z obu anten jednocześnie. Praca z dwóch anten redukowała szumy i zakłócenia. Orientowanie stacji na kierunek północy realizowano za pomocą przenośnego generatora Je-519-4.
Zasilanie z sieci 380/220V 50 Hz przez dwa stabilizatory napięcia Je – 512 – 05 lub z dwóch zespołów prądotwórczych AB-2-T/230 – M1. Awaryjnie przez okres 30 min z baterii akumulatorów (2 baterie 6ST75EM) napięciem 24V w ciągu 30 min lub z prądnicy GSR-6000 napędzanej wałem od silnika samochodu napięciem 27V.
Naziemne radionamierniki lotnicze.
Bibliografia:
Automatyczny radionamiernik ARP-11, opis techniczny i eksploatacja, Warszawa 1986.
Awtomaticzeskie ukw radiopelengatory ARP-4, ARP-5, ARP-1. Opisanie i instrukcja po ekspluatacji, Moskwa 1957.
Naziemne i pokładowe urządzenia radionawigacji i łączności lotniczej, Poznań, 1972.
Ubezpieczenie lotów w lotnictwie sił zbrojnych PRL, Poznań 1981.
Opis i eksploatacja radionamiernika ARP-6, Warszawa 1961.
Radionamiernik ARP-6D, opis techniczny i eksploatacja, Poznań 1977.
Znajomość urządzeń punktu radionamierzania, Ośrodek Szkolenia Specjalistów Ubezpieczenia Lotów, 1979.
Opracował Marek Kaiper