Kraków 2013-05-02
Zarys historii nawigacji. Okres 1945-1960.
Po drugiej wojnie światowej.
Po drugiej wojnie światowej radiolokacja zaczęła rozwijać się jeszcze intensywniej. Na przełomie 40/50 lat XX wieku, wdrożono jeszcze cztery istotne odkrycia, które przyczyniły się do rozwoju radaru. Pierwszym było wykorzystanie zjawiska Dopplera, które poprawia wykrywanie obiektów ruchomych w obecności innych szumów pochodzących na przykład od obiektów naziemnych nieruchomych. Drugim było opracowanie w 1943 roku, radaru monoimpulsowego, który opracował Robert Page pracujący w zespole NRL w USA. Dzięki tej metodzie ewentualny błąd pochodzi z jednego impulsu. W drugim impulsie tego błędu już nie będzie. To znacznie poprawia dokładność śledzenia. Trzecie odkrycie to Phased-array radar. To jest tak jakby w jednym radarze i jego antenie było kilka radarów. Dzięki temu można znacznie szybciej przełączać śledzenie z jednego obiekt na drugi. To z kolei, umożliwiło jednoczesne śledzenie kilku obiektów. Czwarte odkrycie to Synthetic-aperture radar (SAR). Radar został opracowany w 1950 roku, w Goodyear Aircraft Corporation. Metoda ta znacznie zwiększa rozdzielczość obserwowanych obiektów. SAR ma szerokie zastosowanie, szczególnie w mapowaniu i teledetekcji. Do 1960 roku, odkryto i zbudowano niemal wszystkie znane nam obecnie systemy i urządzenia; Nauczono się wykorzystywać zjawisko Dopplera. Wynaleziono tranzystor. Wynaleziono klistronu, lampy o fali bieżącej (lampy mikrofalowe). Zbudowano radary mapujące teren. Zbudowano pokładowy radar impulsowo-dopplerowski, wykrywający cele ruchome na tle ziemi. Zbudowano radar poza horyzontalny. Rozwinięto radary meteorologiczne. Powstały radary z cyfrowym przetwarzaniem danych.
Kontrola ruch lotniczego w 40-latach XX wieku.
W 40-latach XX wieku, system kontroli lotniczej w USA rozwijał się zgodnie z trendami wyznaczonymi w 30-latach. Centra kontroli ruchu lotniczego znacznie się rozwinęły. Każdy samolot będący w powietrzu był pod stałym nadzorem. W ustalony sposób nawiązywano z załogą samolotu łączność radiową. Informowano o przewidywanych warunkach pogodowych na trasie przelotu i innych maszynach będących w pobliżu. Uzyskiwano informacje o bieżącej lokalizacji, zajmowanym pułapie, kursie i prędkości oraz o aktualnych warunkach pogodowych. W ten sposób śledzono ruchy samolotu. W razie konieczności wymieniano się dodatkowymi informacjami wynikłymi z; kłopotów technicznych, kończącego się paliwa, zmiany trasy przelotu, konieczności szybkiego lądowania, itp.
Kiedy samolot zbliża się do lotniska, załoga nawiązuje kontakt z kontrolerem pracującym w wieży kontroli lotów. Następuje wymiana informacji o aktualnych warunkach. Załoga po uzyskaniu zezwolenia od kontrolera o wolnym RWY, sprowadza samolot na ziemię wykorzystując system ILS.
Lata po drugiej wojnie światowej to okres wykorzystania systemów i urządzeń budowanych poprzednio do celów wojennych, w celach pokojowych. W USA, pierwsze cywilne użycie radarów wojskowych do celów cywilnych nastąpiło w 1945 roku. Jako podstawę wzięto radar AN/APQ-13, używany na pokładzie bombowca B-29 do celowania i mapowania. Opracowano wersję naziemną tego radaru. System ten był zamontowany na lotnisku LaGuardia. Pozwalał on na prowadzenie kontroli (śledzenia) w pobliżu lotniska do 15 samolotów, w ciągu godziny. Pozwalało to na śledzenie zbliżającego lub oddalającego się samolotu nieprzerwanie przez około 4 minuty. Drugim głównym celem używania radaru, był monitoring pogody i ostrzeganie przed nadchodzącymi burzami. System ten jednak nie był w stanie precyzyjnie sprowadzić samolotu do lądowania. System ILS, znany obecnie, rozwinął się nieco później. Ostatecznie zbudowano około 30 egzemplarzy radarów naziemnych AN/APQ-13 i zamontowano na różnych lotniskach w USA.
W 1946 roku, Civil Aeronautics Administration (CAA), poprzedniczka FAA, zaprezentowała publicznie eksperymentalny radar zamontowany na wieży kontroli lotów cywilnych. Był to początek przemian w kontroli ruchu lotniczego. Już nie tylko łączność radiowa, ale także radar. Próby dopracowania systemu trwały kilka lat.
W 1950 roku, radar AN/APQ-13, jako cywilny radar ASR-1 (Aiport Surveillan Radars) został przyjęty oficjalnie w lotnictwie cywilnym.
W 1954 roku, na bazie radaru AN/APQ-13, utworzono odmianę radaru, który oznaczono AN/CPS-9. Radar był przeznaczony do monitorowania pogody. Naturalną konsekwencją było powstanie w 1957 roku, cywilnego radaru pogodowego WSR-57 (Weather Surveillance Radar).
W 1956 roku, Civil Aeronautics Administration zamówiła nowe radary dalekiego zasięgu, aby wykorzystać je do kontroli trasy atlantyckiej z USA do Europy. Wstępna specyfikacja mówiła o wykrywaniu samolotów na wysokich pułapach (do 10 000 m) i o zasięgu minimum 200 NM (370 km). Dalszy rozwój nastąpił już w 60-latach.
Europa po drugiej wojnie światowej wyszła bardzo okaleczona. Powszechna nieufność do siebie, poszczególnych narodów nie sprzyjała i nie sprzyja rozwojowi. Nastąpił istotny podział Europy na dwa przeciwstawne obozy polityczne. Doszło do blokady Berlina Zachodniego przez moskali, poprzez likwidację wszystkich lądowych szlaków drogowych i kolejowych, które łączyły zachodnich germańców (RFN) z Berlinem Zachodnim. Pozostała tylko droga powietrzna. Aby zapewnić kontrolę i identyfikacje ruchu lotniczego z lub do Berlina Zachodniego, amerykanie utworzyli bardzo sprawny system oparty na radarze AN/TPS-44. Radar ten należał do mobilnych, a główne jego elementy były transportowane na dwóch samochodach lub koleją, ewentualnie transportem lotniczym (Herkules C-130). Dzięki temu, można było go instalować we wszystkich zapalnych rejonach świata, między innymi na Biskim Wschodzie, Ameryce Południowej i w Azji Południowo-Wschodniej. Tak doszło do powstania pierwszego europejskiego systemu bezpieczeństwa, kontroli i identyfikacji cywilno-wojskowego ruchu lotniczego. Ten debiut nastąpił w 1948 roku.
Do chwili obecnej (2013 rok) wojska USA stacjonują w RFN, nie po to by bronić germanów, ale po to aby pilnować germańców, którzy rozpoczęli by trzecią wojnę światową.
Podstawowe przyrządy nawigacyjne.
Okres 40-lat to powszechne wprowadzanie do użytku lotu po trasie według radiolatarni.
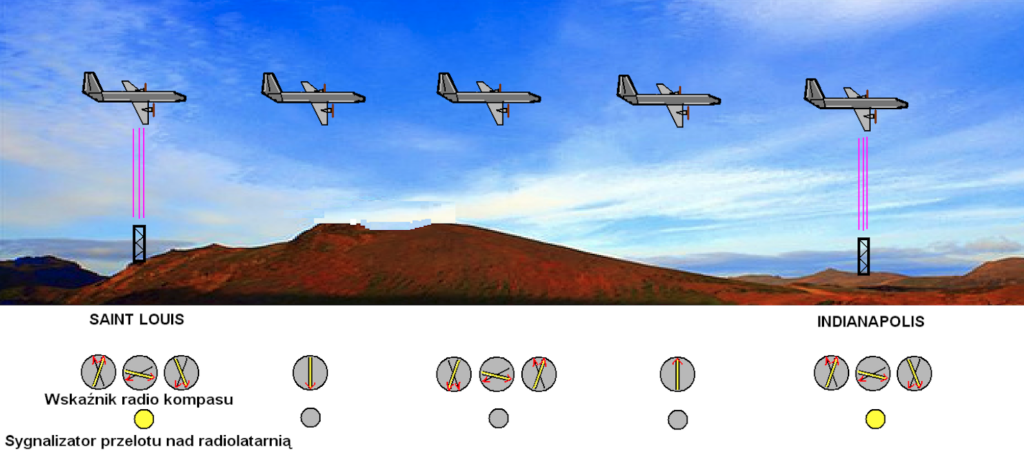
Zasada nawigacji (system LFB) z wykorzystaniem radiolatarni jest bardzo prosta i bardzo skuteczna. Na pokładzie samolotu znajduje się radiokompas, który ustawiano na sygnał radiolatarni nad którą samolot miał przelecieć. Wskaźnik radiokompasu obiema wskazówkami wskazuje tę radiolatarnię (Saint Louis). Pilot steruje samolotem zgodnie ze wskazaniem. W momencie przelotu nad radiolatarnią obie wskazówki przemieszczają się, a jednocześnie zapala się lampka. Teraz załoga przestawia namiar na kolejną radiolatarnię. Jeśli radiolatarnia jest na tym samym kursie, to można nie zmieniać nastawienia, bo w połowie drogi między radiolatarniami, urządzenie wybierze nowy sygnał (Indianapolis), który będzie teraz mocniejszy. O przelocie nad radiolatarnią załoga informuje drogą radiową kontrolerów naziemnych.
To jest tylko fragment większego systemu nawigacyjnego rozwijanego w USA od 1929 roku. System ten nosił początkowo oznaczenie LFR (Low Frequency Range). Następnie LFB (Low Frequency Beacon) i LF-RNG (Low Frequency Radio Range). System był rozwijany i użytkowany do końca 60-lat. Radiolatarnie początkowo stawiano wzdłuż tras (korytarzy) lotniczych między lotniskami. Z czasem zaczęto je stawiać na przecięciach tras lotniczych. System i jego wykonanie było tak staranne, iż maszty postawione w 30-latach, stoją do chwili obecnej i są wykorzystywane jako radiolatarnie kolejnego systemu NDB.
W tym miejscu jeszcze jedno spostrzeżenie; Musimy pamiętać, że w 40/50-latach, nawet w USA, lotnictwo komunikacyjne było wciąż nowością. Nawet dla amerykanów bilety lotnicze były drogie. Dlatego linie lotnicze starały się jak najbardziej urozmaicać pasażerom lot. Ponieważ większość przelotów odbywała się na połapie do 7 000 m, więc widoki z pokładu samolotu, były bardzo ciekawe. Zwłaszcza jeśli się leci nad Górami Skalistymi. Piloci mieli od linii lotniczych niepisane prawo zmiany trasy lotu lub nawet zmiany zajmowanego pułapu. Nie było wówczas pełnej kontroli radarowej, więc kontrolerzy polegali wyłącznie na informacjach załóg samolotów. Taka sytuacja była jedną z przesłanek do katastrofy lotniczej, która wydążyła się w dniu 30 czerwca 1956 roku, nad Wielkim Kanionem. W powietrzu zderzyły się dwa samoloty; DC-7 i Super Constellation. Śmierć poniosło 128 osób. Była to wówczas największa katastrofa lotnicza.
Przeloty nad Północnym Oceanem Atlantyckim.
Dużo większym problemem były przeloty z Ameryki do Europy. Amerykanie zdobyli spore doświadczenie w okresie drugiej wojny światowej, a dokładniej w okresie 1942-1945. Ich samoloty przemierzały ten dystans nawet 20 razy dziennie, przewożąc dyplomatów, żołnierzy, uzbrojenie, pocztę i ważne towary. Podstawowymi problemami było utrzymanie odpowiedniego kursu i rozpoznanie pogody. Dlatego z pomocą przyszła marynarka wojenna, która rozmieściła w kilku miejscach okręty zabezpieczenia nawigacyjnego i meteorologicznego. Musimy także pamiętać, że ówczesne samoloty nie dysponowały zasięgiem wystarczającym na przelot non stop z Nowej Funlandii (St. John’s w Kanadzie) do Londynu (dystans około 4 000 km). Dlatego dystans ten dzielono na dwa lub trzy etapy, tankując na Grenlandii i/lub Islandii. Trasa ta zbliżona jest do ortodromy, więc nie nadkładano wiele drogi. Ten prosty system, okazał się skuteczny i został (z niewielkimi zmianami) zachowany w czasach pokoju. Do systemu przystąpiły także inne kraje, które były zainteresowane przelotami nad Oceanem Atlantyckim. System ten był utrzymywany do końca 60-lat. Został zastąpiony przez radary dalekiego zasięgu, które konstruowano od 1956 roku.
System lądowania ILS.
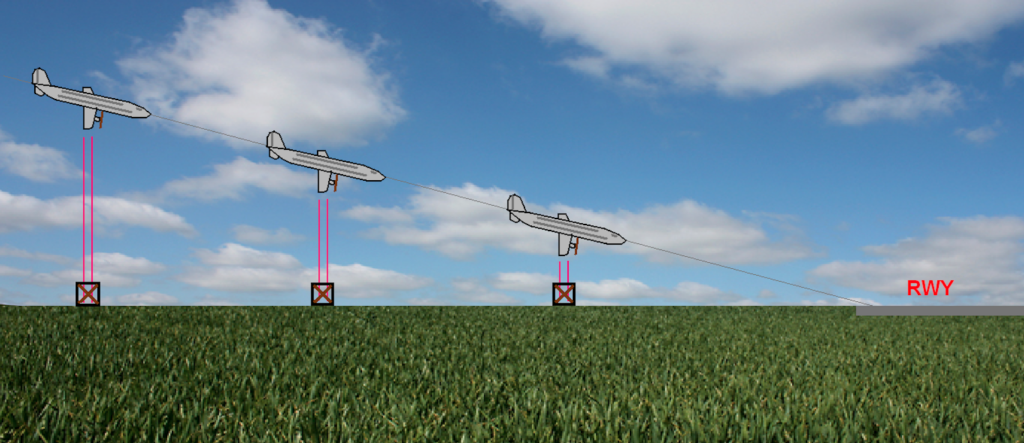
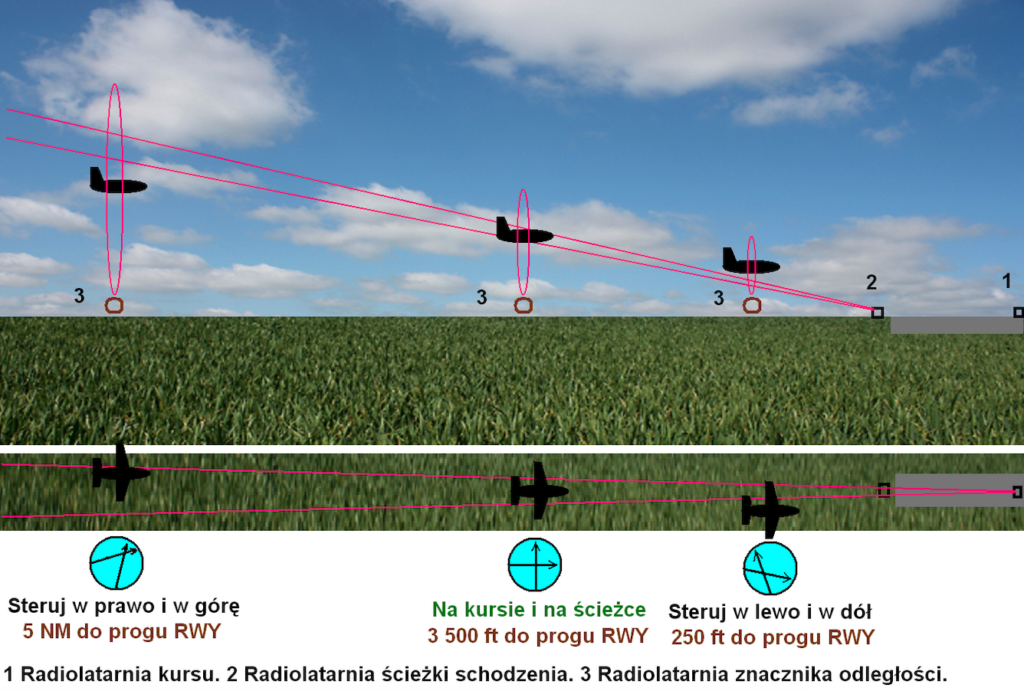
Ten system ILS, opracowany w 40-latach, nie należy utożsamiać z system obecnie funkcjonującym (2013 rok). Był on pierwowzorem tego obecnego i bardziej przypomina system lądowania według radiolatarni dalszej i bliższej, używanego przez długie dziesięciolecia we wschodnim bloku wojskowym. Składał się on z czterech radiolatarni. Pierwsza była zwykła radiolatarnia trasowa. Po jej minięciu załoga samolotu wiedziała jaki jest dokładnie dystans do RWY (DS, drogi startowej) i mogła rozpocząć zniżanie z odpowiednim kątem podejścia (prędkością opadania). Przed samym RWY, co 1 NM, były kolejno trzy radiolatarnie. W samolocie był wskaźnik posiadający dwie wskazówki. Jedna wskazówka pozioma – wskazywała wysokość. Kiedy wychylała się za bardzo do góry, to samolot był za nisko. Jeśli za bardzo do dołu, to samolot już był za wysoko. Druga wskazówka pionowa – wskazywała zejście od prawidłowego kursu. Dodatkowo była sygnalizacja złożona z trzech kontrolek (lampek). Z biegiem lat i zebranym doświadczeniem, radiolatarnie na podejściu do lądowania ustawiano w innych odległościach. Pierwsza około 5 NM, druga 2/3 NM i 0,1 NM. Oczywiście sporo zależało od możliwości terenowych. Ponieważ były to systemy drogie w zakupie, montażu i eksploatacji, nie stosowano ich na wszystkich podejściach i wszystkich RWY.
Z powodu stosowania radionawigacyjnych systemów, znacznie zmalała rola busoli, chociaż do chwili obecnej (2013 rok) nie zniknęła ona z tablicy rozdzielczej. Większa rola busoli była w lotnictwie wojskowy, niż komercyjnym. O busoli i problemach z nią związanych, jeszcze wspomnimy. Pozostałe wskaźniki na pokładzie samolotu były bardziej tradycyjne. Wśród nich należy wymienić; sztuczny horyzont, wysokościomierz, prędkościomierz, wariometr. Wszystkie te systemy były dublowane, a czasami nawet potrajane. Przyrządy były mechaniczne lub elektro-mechaniczne. Wielkość informacji uzyskiwano z sond Pitota. Podstawą większości tych przyrządów był układ żyroskopowy.
W omawianym okresie ustalił się skład załogi na pokładzie samolotu. Podstawowa załoga składała się z trzech osób; dwóch pilotów i mechanika pokładowego. Czasami, kiedy lot był wykonywany na nowej trasie, do załogi dołączał nawigator. Już w tym czasie, w powszechnym użyciu były procedury; przedstartowe, startowe, przelotu, lądowania, zakończenia pracy samolotu i postępowania w sytuacjach awaryjnych. Każda procedura opierała się o tak zwaną checklist. Załogi samolotów rekrutowały się głównie z lotników, którzy doświadczenie lotnicze zdobyli podczas drugiej wojny światowej. Dlatego były to załogi bardzo doświadczone. Oprócz tego, do obsługi pasażerów był tak zwany personel pokładowy. Jego ilość zależał od ilości pasażerów na pokładzie i standardu obsługi, jaki zapewniała dana linia lotnicza. Personel pokładowy zawsze składał się z kobiet, bo kobiety zawsze potrafiły wprowadzić miłą atmosferę na pokładzie.
Podróż samolotem.
Convair, Douglas i Lockheed to były trzy firmy które łącznie zbudowały ponad 3 000 samolotów pasażerskich, w okresie 1945-1960. To właśnie te samoloty zdecydowały o ogólnym charakterze lotnictwa komercyjnego w USA i na świecie. Zapewniały one wysoki poziom bezpieczeństwa i duży poziom wygody. Bilety były drogie, ale coraz więcej ludzi decydowało się na podróż samolotem, która miała te przewagę nad autobusem, samochodem lub pociągiem, że na długich dystansach była zdecydowania szybsza. Zapewniano pasażerom wygodne fotele, posiłki, gazety i czasopisma, możliwość palenia wyrobów tytoniowych oraz dostęp do toalet. Z czasem, pasażerowie mieli możliwość słuchania muzyki lub oglądania filmów. Spory odsetek samolotów, zwłaszcza w drugiej połowie 40-lat, oferował nocne przeloty w kabinach sypialnych wyposażonych w kuszetki (koje, prycze). Pasażerom udostępniano możliwość zabrania na pokład sporej ilości bagażu.
Nie zapominajmy także, że w dalszym ciągu, w 40/50-latach podstawą transportu komercyjnego nie były przewozy pasażerskie, ale przewozy pocztowe. Listy i paczki to był podstawowy towar jaki zabierały na pokład samoloty komercyjne.
Opracował Karol Placha Hetman