2021 rok
Wojskowe systemy lądowania dzielono na: na system lądowania według przyrządów (USL) i system lądowania według komend z ziemi, w Polsce nazywany radiolokacyjnym systemem lądowania (RSL) – przetłumaczony na polski rosyjski skrót RSP (radiołokacjonnaja sistema posadki). W skład systemu USL wchodziły dalsza radiolatarnia, radionamiernik, bliższa radiolatarnia, nadajniki radiosygnałowe i urządzenia elektroświetlne. System USL stał się podstawową komórką, do której dodawano wyposażenie elektroniczne tworząc bardziej zaawansowane systemy takie jak USL z RSL, USL z PRMG (radiolatarnie kursu i ślizgu), USL z RSL i PRMG oraz tworzono systemy lądowania SP-1 i SP-2. W systemie SP-1 zastosowano system USL z RSL i PRMG oraz radiotechniczny system bliskiej nawigacji RSBN, radiolokacyjną stację obserwacji powierzchni lotniska, impulsowe światła zbliżania i podejścia, światła osi drogi startowej. W skład systemu SP-2 wchodziły jedynie USL z RSL i PRMG oraz RSBN.
System RSP-5 był dalszym rozwojem radiolokacyjnego systemu lądowania RSP-4. W skład systemu RSP-4 wchodziły: radiolokator dyspozytorski DRŁ-4, radiolokator lądowania PRŁ-4 z dwoma radiostacjami UKF RSIU-4, radiolokator obserwacji okrężnej ORŁ-4 na samochodzie GAZ-63, automatyczny radionamiernik ARP-4 lub ARP-5, dyspozytorski punkt dowodzenia PDP-4 (Podwiżnoj Dispiadczerskij Punkt). W PDP-4 znajdowały się wskaźniki wynośne wszystkich stacji radiolokacyjnych systemu RSP-4, dwie radiostacje samolotowe krótkofalowe RSI-6 o zakresie 3,75 – 5 MHz oraz łącznica telefoniczna. Całość systemu przewożona była na 11 pojazdach. Uproszczoną wersją RSP-4 był RSP-5 składający się z radiolokatora lądowania PRŁ-5 na samochodzie 4×2 JAZ-200/MAZ-200 lub przyczepie i radiolokatora obserwacji okrężnej ORŁ-5 na samochodzie 6×6 ZIŁ-157 (zmodernizowana wersja radiolokatora P-10 wyposażona w aparaturę identyfikacyjną „swój-cudzy” NRZ-1 z osobną anteną stawianą na maszcie w pobliżu radiolokatora (radiolokacja wtórna). Kolejne radiolokacyjne systemy lądowania składały sie z radiolokatora lądowania i radiolokatora obserwacji okrężnej umieszczanych w jednym środku transportu, RSP-6 w przyczepie PAU-1 i stacji zasilającej PEP-4 na przyczepie z anteną radionamiernika. W RSP-7 i RSP-10 w nadwoziu samochodu ciężarowego ZiŁ-157 lub ZIŁ -131. W obu przypadkach anteny radiolokatora obserwacji okrężnej DRŁ-7 lub DRŁ-10 umieszczone były na dwuosiowej przyczepie 2-PN-4 (SMZ-810).
Radiolokator lądowania PRŁ-5M.
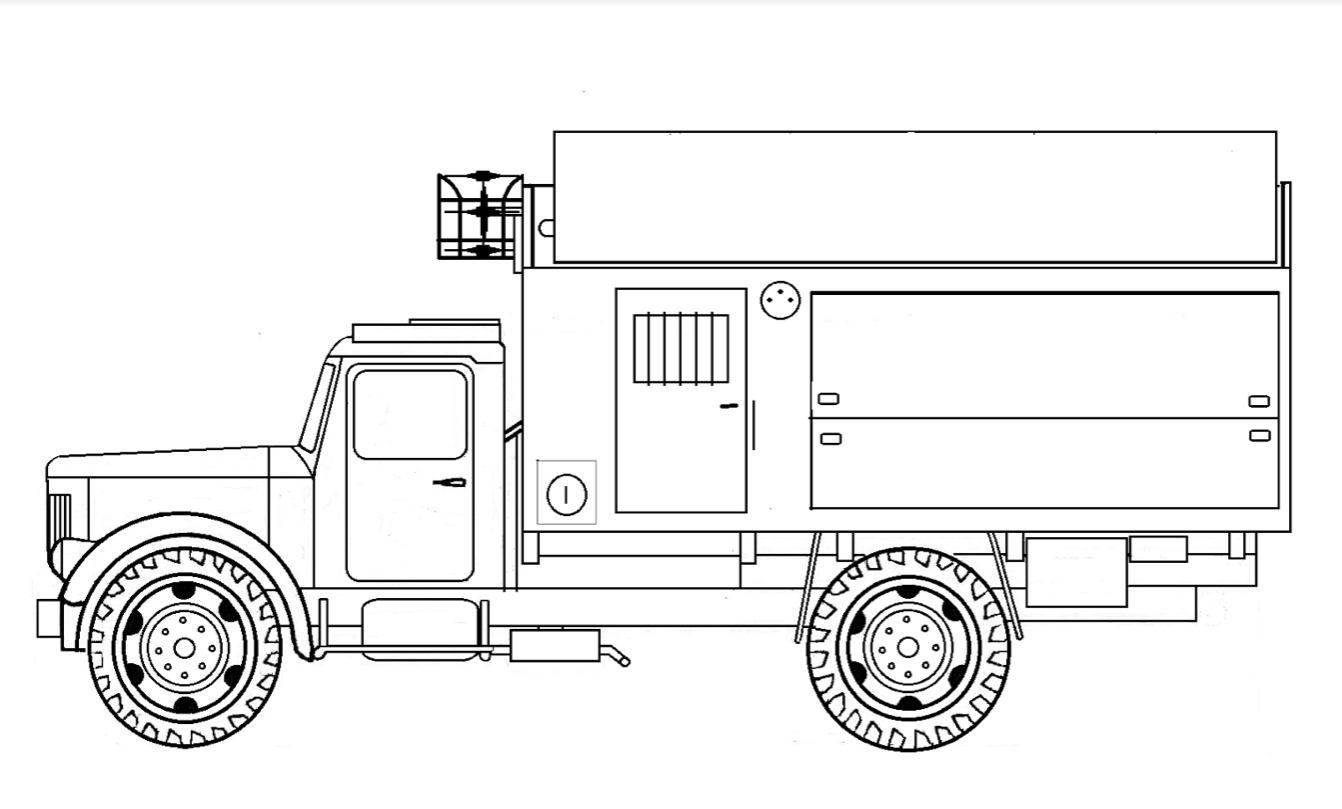
Radiolokator PRŁ-5M był dalszym rozwojem radiolokatora PRŁ-5, umieszczony był w nadwoziu samochodu ciężarowego 4×2 MAZ-200 z tylnymi kołami bliźniaczymi, zespół prądotwórczy PER-4 umieszczony był w nadwoziu samochodu ciężarowego 4×4 MAZ-502. Radiolokator PRŁ-5M z uwagi na duży ciężar mógł się poruszać po drogach z mostami o nośności 15 ton. Przeznaczony był do kierowania lądowaniem samolotów wyposażonych w radiostację korespondencyjną UKF (R-800 lub R-801), w trudnych warunkach w dzień i w nocy. Minimalne warunki pracy; podstawa chmur 50 m, widzialność 500 m. Kierowanie zniżaniem samolotów do wysokości 50 -70 m. Radiolokator lądowania PRŁ-5M był przeznaczony do pracy w dwóch wariantach.
Wariant pierwszy „niezależny”: w zestawie radiolokator lądowania PRŁ-5M i zespół prądotwórczy PED-4.
Wariant drugi „wspólny” z radiolokatorem obserwacji okrężnej ORŁ-5 z zespołem prądotwórczym PER-4.
Podczas pracy niezależnej radiolokator PRŁ-5M stanowił uproszczony system ślepego lądowania samolotów według komend z ziemi. Zapewniał on wykonywanie sprowadzania samolotów w rejon działania radiolokatora metodą „zajścia z prostej”, korygowanie kursu i ślizgu podczas lądowania. W przypadku pracy z radiolokatorem obserwacji okrężnej ORŁ-5 wzrastały jego możliwości operacyjne ze względu na możliwość śledzenia samolotów w odległości oraz ich indywidualnego rozpoznania za pomocą radionamiernika.
W skład radiolokatora PRŁ-5M wchodziły:
- Układ antenowo falowodowy;
- Układy antenowe radionamiernika i radiostacji korespondencyjnych;
- Dwie szafy nadawczo odbiorcze;
- Stojak urządzeń wskaźnikowych z radionamiernikiem, i wskaźnikiem połączonym (WP);
- Stojak zasilania i sterowania urządzeń wskaźnikowych;
- Trzy radiostacje UKF RSIU-4 (R-801);
- Tablica rozdzielcza;
- Stół do sprzętu zapasowego;
- Tablica wejścia anteny;
- Magnetofon Dniepr / MIZ-10;
- Akumulatory NKN-60 (5 szt.)
- Przetwornica awaryjna PO-500;
- Oscylograf SI-1;
- Aparaty telefoniczne;
- Busola artyleryjska PAB-2 (do orientowania anteny radionamiernika).
Szafa nadawczo odbiorcza przeznaczona była do generowania krótkotrwałych impulsów mocy w.cz., przekazywania ich do anten a także przyjmowania i wzmacniania sygnałów odbitych od samolotów i doprowadzania ich do wskaźników. Nadajnik pracował na magnetronie MI-53 i triodach impulsowych GMI-83, odbiornik na klistronie K-49 i tyratronach TG-1/03. Prostownik nadajnika zbudowany był na kenotronach W1-01/30. W nadajniku magnetron umieszczony był między biegunami magnesu stałego o natężeniu pola magnetycznego w szczelinie 4800 – 5000 Oe. Szafa nadawczo odbiorcza składała sie z: bloku zasilania odbiornika, bloku wysokiej częstotliwości odbiornika, tablicy kontrolnej odbiornika, bloku wzmacniaczy odbiornika, bloku magnetronu, bloku prostowników 1500V i 700V, bloku modulatora i bloku prostownika wysokiego napięcia. Bloki: prostownika + 1500 V i – 700 V , modulatora i prostownika wysokiego napięcia nadajnika wyposażone były w prostokątne okienka (wzierniki) umożliwiające wzrokową kontrolę żarzenia lamp i sprawdzenie czy nie występuje iskrzenie między stykami. Brud (kurz) na izolatorach powodował powstanie iskrowego przebicia do masy. Radiolokator wyposażony był w dwie szafy nadawczo odbiorcze, roboczą i awaryjną. Ułatwiało to znacznie obsługę techniczną.
Czas potrzebny na rozgrzanie się aparatury był czasem wirowania biało-czerwonego krążka w okienkach tablic rozdzielczych (dwie tablice, po jednej dla każdej szafy nadawczo odbiorczej). Kiedy krążek się zatrzymał włączane było wysokie napięcie. W przypadku konieczności szybkiego włączenia pod okienkiem umieszczony był przycisk opisany „blokirowka rele wremieni”, jego naciśnięcie zwierało przekaźnik czasowy włączając natychmiast wysokie napięcie. Stosować to można było jednak wyłącznie w sytuacjach awaryjnych.
Wskaźnik połączony przeznaczony był do zobrazowania sygnałów odbitych od samolotów znajdujących się w strefie obserwacji radiolokatora ORŁ-5 oraz do określania azymutu i odległości samolotów od niego. Na wskaźniku tym była także wyświetlana linia namiaru z radionamiernika UKF. Na płycie czołowej wskaźnika WP umieszczone były potencjometry „jaskrawość” i „ogniskowanie” oraz przełącznik zakresów odległości 100 km i 200 km. Wskaźnik zbudowany był na lampie oscyloskopowej 31ŁM32 z odchylaniem magnetycznym. Szafa wskaźnika połączonego składała się z bloku napięć odchylających, bloku podstawy czasu wskaźnika, bloku wskaźnika, układu synchronizacji śledzenia, selsynu nadawczego DI-511 i selsynu odbiorczego, SS-501.
W radiolokatorze znajdowały się dwa wskaźniki kursu i dwa wskaźniki ślizgu, zbudowane na lampach oscyloskopowych 31ŁM32. Jeden komplet: wskaźnik kursu i ślizgu znajdował się w dyspozycji operatora lądowania, drugi komplet identycznych wskaźników znajdował się w dyspozycji kierownika lądowania. Radiolokator wyposażony był w 3 pulpity: kierownika lądowania, operatora lądowania i operatora wskaźnika połączonego.
Urządzenia łączności radiowej składały się z trzech radiostacji UKF RSIU-4 (R-801W) z antenami dyskowo-stożkowymi. Radiostacja nr 1 wykorzystywana była przez operatora wskaźnika połączonego do korespondencji z samolotem, co umożliwiało dokonanie namiaru. Radiostacja nr 2 używana była przez operatora lądowania do utrzymywania łączności z lądującym samolotem. Radiostacja nr 3 była radiostacją rezerwową mogącą w razie takiej potrzeby pełnić funkcję radiostacji nr 1 lub nr 2. Radiostacja rezerwowa nie miała własnej anteny w przypadku awarii odłączano kabel antenowy od uszkodzonej radiostacji podłączając go do radiostacji awaryjnej. Nowsze wersje miały trzy anteny z dyskami w górnym położeniu tak jak w RSP-6M.
Układ antenowo falowodowy był przeznaczony do przesyłania impulsów wysokiej częstotliwości i dużej mocy z nadajnika do anten a także do odbioru impulsów odbitych od samolotu i przekazywania ich z anten do odbiornika.
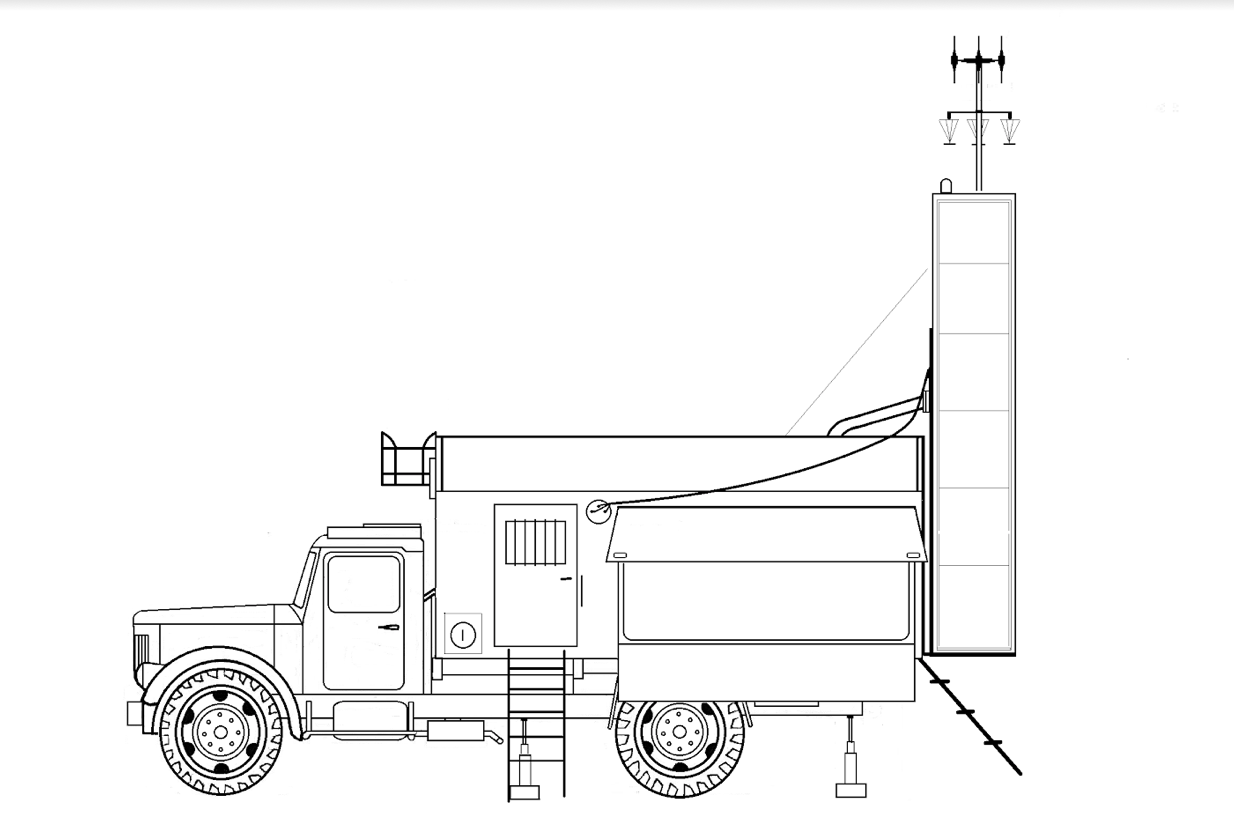
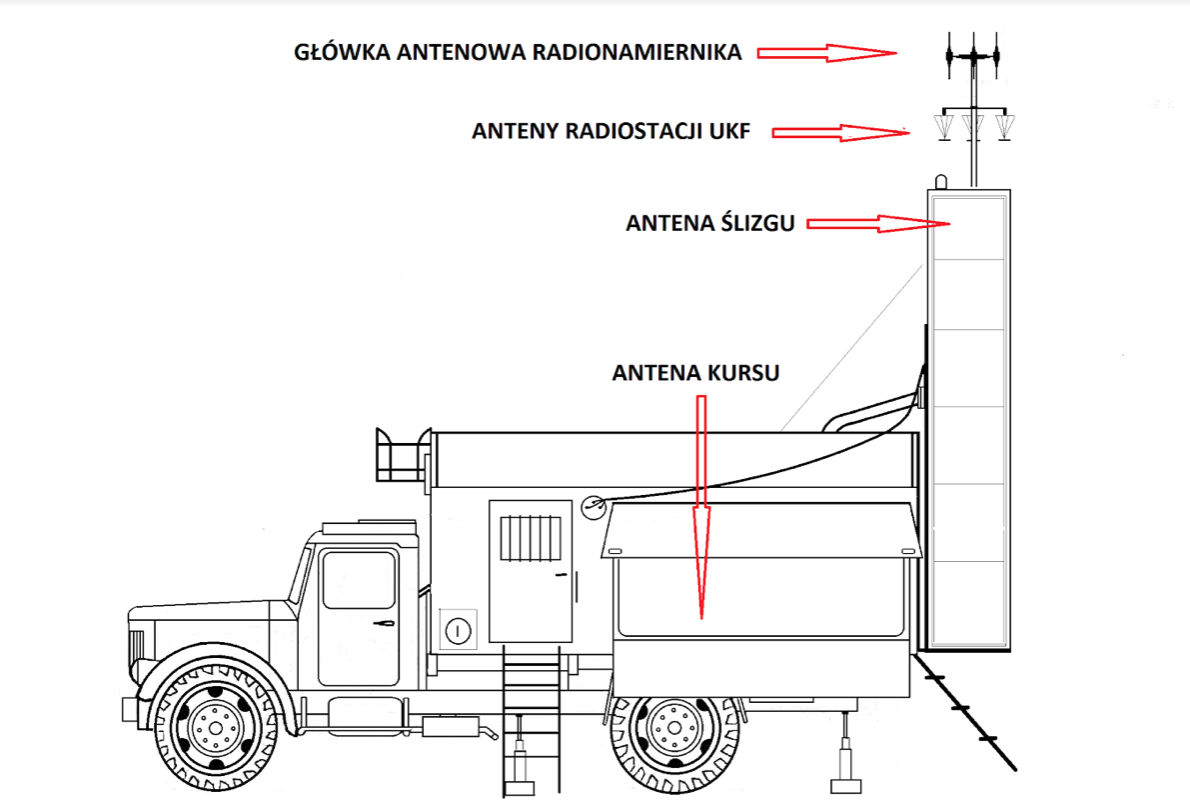
Anteny kursu i ślizgu umieszczone były w specjalnych pojemnikach zamkniętych płytami z twardego styropianu dla ochrony przed warunkami atmosferycznymi. Każda z anten składa się z półfalowych dipoli umieszczonych w jednej linii z ogniskową reflektora parabolicznego. Reflektor anteny kursu miał długość 2,6 m a reflektor anteny ślizgu 4 m. Dzięki takim wymiarom reflektorów i małej długości fali otrzymuje się małą szerokość wiązki promieniowania. Szerokość charakterystyki kierunkowej anteny kursu wynosi w płaszczyźnie poziomej 1° a w płaszczyźnie pionowej 2° Parametry te są wystarczające by samolot, który odchylił się z kursu nie wyszedł ze strefy promieniowania anteny przy nieruchomych reflektorach. Antena ślizgu może się obracać w płaszczyźnie poziomej o kąt 20° a jej wiązka nieprzerwanie się waha w płaszczyźnie pionowej. Antena kursu może się obracać o kąt 8° w płaszczyźnie pionowej a jej wiązka nieprzerwanie waha się w płaszczyźnie poziomej w granicach 20°. Anteny są zasilane kolejno z jednego urządzenia nadawczo odbiorczego. Kolejne przełączanie anten odbywa się za pomocą przełącznika antenowego napędzanego silnikiem elektrycznym. Pojemnik anteny ślizgu na czas transportu układany był na dachu nadwozia w jego wnęce za pomocą specjalnego mechanizmu. Do pracy ustawiany był pionowo z tyłu nadwozia. W tylnej części pojemnika anteny ślizgu umieszczono jarzma do mocowania masztu radionamiernika z antenami korespondencyjnych radiostacji UKF. Główka antenowa radionamiernika typu A-10 była taka jak w radionamiernikach ARP-6.
Układ sterowania antenami przeznaczony był do skierowania wiązki w określonym kierunku. Składał się on z układu sterowania anteną kursu w kącie elewacji oraz układu sterowania anteną ślizgu w azymucie. Układ sterowania anteną kursu składał sie z mechanizmu elektrycznego MPR-4 zamontowanego w przedziale anteny kursu i połączonego z nią układem dźwigni przekazującym ruch wału na reflektor anteny. Napęd anteny ślizgu był analogiczny. W przedziałach anten zamontowano przełączniki krańcowe zasilania silników układu sterowania. Na pulpicie sterowania operatora lądowania znajdował się przełącznik podający napięcie +26 V na przełączniki „kurs” i „ślizg”. Za ich pomocą realizowane było sterowanie silnikami MPR-4 odpowiednich anten.
Zasilanie stacji napięciem zmiennym 115 V, 427 Hz z przetwornicy zasilanej napięciem trójfazowym 220 V 50 Hz. W przypadku zaniku napięcia sieci energetycznej automatycznie włączała się przetwornica PO-500, czas pracy około 30 minut, co umożliwiało włączenie zespołu prądotwórczego bez przerywania pracy radiolokatora.
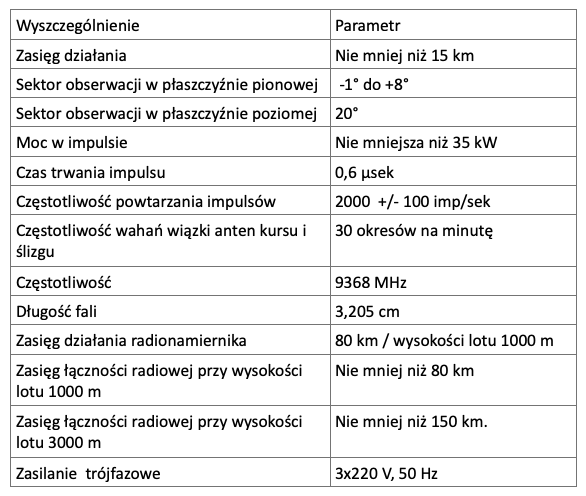
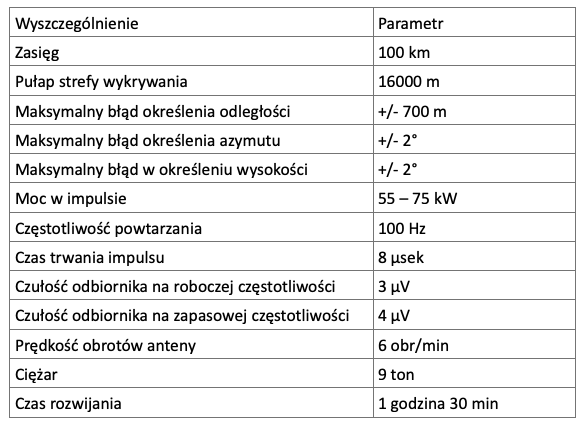
Podstawowe dane radiolokatora PRŁ-5M:
Radiolokator ORŁ-5.
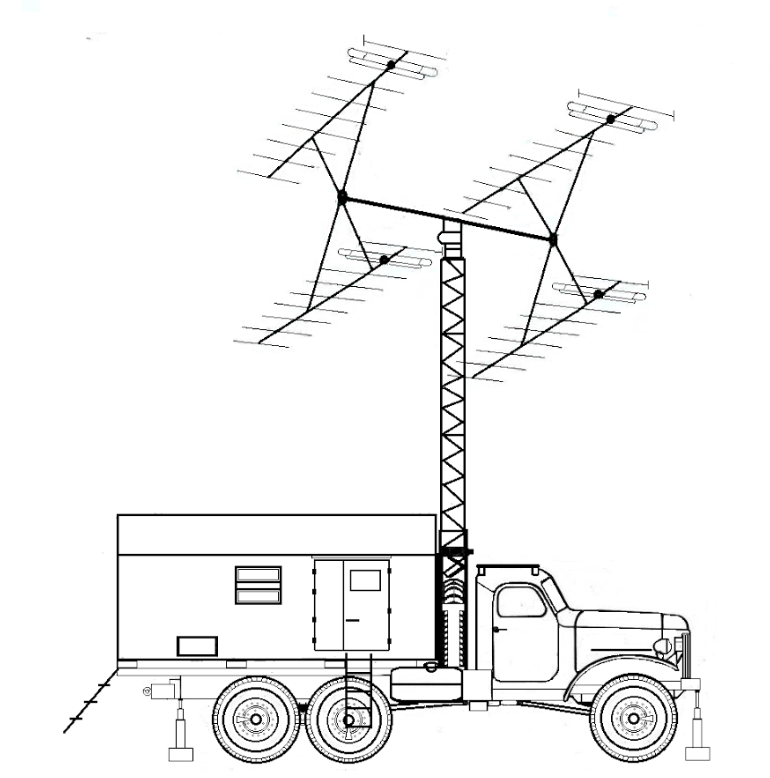
Był zmodyfikowanym radiolokatorem obserwacji okrężnej typu P-10 przystosowanym do pracy w służbie ubezpieczenia lotów. W okresie eksploatacji był urządzeniem tajnym. Radiolokator P-10 był dalszym rozwojem radiolokatora P-8, wprowadzonym do uzbrojenia wojsk ZSRR w 1953 roku, był także używany w WP. Pierwowzorem obu radiolokatorów był brytyjski radar z czasów wojny Anti-Aircraft No 4 Mk III, którego rozwojem był także ORŁ-4. Radiolokator ORŁ-5 służył do naprowadzania samolotów w rejon lotniska z odległości równej swojemu zasięgowi, to znaczy z odległości 200 km. Radiolokator zabudowany był w nadwoziu KUNG-1 samochodu ZiŁ-157. W ramach modernizacji zmieniono samochód transportowy z ZiS-151 na ZiŁ-157 z pompowanymi w czasie jazdy oponami. Jego cechą charakterystyczną była poczwórna antena typu Yagi o wysokości 9,3 m, stawiana na kratownicowym maszcie typu „Unża” (dopływ Wołgi). Kratownicowe sekcje masztu wstawiane były od dołu w jego obudowę, skręcane 4 śrubami z reduktorem anteny i podciągane do góry wraz z anteną specjalną napędzaną korbą wyciągarką. Po podniesieniu do góry pierwszego segmentu masztu , wstawiano kolejny powtarzając operację aż do osiągnięcia odpowiedniej wysokości anteny. Przed rozwinięciem anteny samochód stabilizowano i poziomowano za pomocą 4 podnośników śrubowych po dwa z przodu i z tyłu.
W przypadku pracy „wspólnej” radiolokator ORŁ-5 podłączany był kablami z radiolokatorem PRŁ-5M. Zobrazowanie z ORŁ-5 wyświetlane było na wskaźniku połączonym PRŁ-5M. W przypadku pracy samodzielnej podłączano do ORŁ-5 radionamiernik ARP-5 lub ARP-6. Radiolokator P-10 był na owe czasy nowoczesnym urządzeniem wyposażonym w magnetron o dwóch przełączanych częstotliwościach. W razie zbyt dużej ilości zakłóceń na wskaźniku można było szybko zmienić częstotliwość pracy. Wyposażony był w wskaźnik obserwacji okrężnej na lampie 31ŁM32 i mniejszy wskaźnik wysokości. Wskaźnik ten mierzył kąt elewacji a wysokość celu odczytywano z nomogramu. Układ tłumienia ech stałych (TES) wyposażony był w potencjałoskop (elektronopromieniowa lampa pamięciowa). Radiolokator wyposażony był w aparaturę identyfikacji samolotów „swój lub cudzy” typu NRZ-1 z anteną na maszcie lub NRZ- 10 z anteną stawianą na niskim trójnogu. Obroty jej zsynchronizowane były z obrotami anteny ORŁ-5. Urządzenie wysyłało sygnał zapytujący do samolotu i po otrzymaniu odpowiedzi z samolotowego urządzenia odzewowego SRO-1 lub SRO-2 (transponder) identyfikowało samolot. Zidentyfikowany samolot jako „swój” oznaczony był na ekranie wyświetloną kreską umieszczoną pod odbiciem od samolotu, czyli widoczne były dwie kreski. W nowszych systemach RSP-6, RSP-7, RSP-10 zrezygnowano z osobnego nadajnika z anteną. Zapytanie wysyłane było w rodzajach pracy „aktywny” lub „mieszany” (połączenie rodzajów pracy „aktywny” z „pasywnym”), impulsy zapytujące wysyłane były przez antenę radiolokatora dyspozytorskiego DRŁ-6, DRŁ-7 lub DRŁ-10.
Zasilanie 3×380 V 50 Hz lub 3×220 V 50 Hz. Zasilanie awaryjne z stacji zasilającej PER-4 na samochodzie ZiŁ-157 w której umieszczono dwa zespoły prądotwórcze AŁD-10 A. Każdy z nich składał się z silnika wysokoprężnego 3R2-2Cz8,5/11-3 o mocy 10 KM i prądnicy SGS-6,25 o mocy 5 kW.
Podstawowe dane techniczne ORŁ-5:
Zakończenie.
System RSP-5 w składzie radiolokator lądowania, radiolokator obserwacji okrężnej ORŁ-5 rozwinięty na terenie Ośrodka Szkolenia Służby UL (OSSUL) w Grudziądzu w 1970 roku służył do szkolenia w ramach praktyk na sprzęcie UL kadetów profilu radionawigacja z Technicznej Szkoły Chorążych w Jeleniej Górze. W wykazach uzbrojenia był wykazywany do połowy lat 90 tych. Radiolokator obserwacji okrężnej ORŁ-5 był w owym okresie tajny. Na wykładach notatki robiono w tajnych zeszytach, które po wykładzie były zbierane umieszczane w drewnianej skrzynce zamykanej na kłódkę i przekazywane do depozytu. System antenowy PRŁ-5M na długie lata pozostał zapomniany. Nowe radiolokatory systemów RSP-6, RSP-7, RSP-10 miały anteny zewnętrzne. Dopiero w 21 wieku powrócono do koncepcji anten wewnętrznych w radiolokatorze lądowania PRŁ-27S. Jednak są to już zupełnie inne anteny.
Bibliografia.
Notatki własne z wykładów na temat sprzętu ubezpieczenia lotów w TSCh Jelenia Góra i OSSSUL w Grudziądzu w latach 1969 -1970.
Opracował Marek Kaiper